Cara Kerja Aplikasi Tingkat Roh: Akselerometer Dijelaskan
Ponsel Anda tahu arah mana yang ke bawah karena berisi akselerometer MEMS — sensor mekanik mikroskopis yang mengukur akselerasi gravitasi pada tiga sumbu secara bersamaan. Aplikasi tingkat roh membaca tiga angka ini, menerapkan trigonometri, dan menampilkan hasilnya sebagai sudut. Seluruh proses terjadi ratusan kali per detik, senyap, di dalam chip yang lebih kecil dari butir pasir. Berikut cara pastinya bekerja.
- Akselerometer MEMS biaya sekitar $0,50 dalam produksi massal, namun mencapai akurasi ±0,1-0,3° setelah kalibrasi.
- Pitch dan roll dihitung menggunakan rumus arctan yang diterapkan pada bacaan gravitasi tiga sumbu.
- Spirit Level Pro menerapkan exponential moving average (alpha=0,15) untuk meratakan kebisingan sensor sebesar 60-80%.
- Perubahan suhu 10°C dapat menggeser bacaan sensor MEMS sebesar 0,1-0,5°, membuat kalibrasi di lokasi penting.
- Untuk pengukuran statis, akselerometer saja sudah cukup — giroskop tidak diperlukan.
Apa itu Akselerometer MEMS?
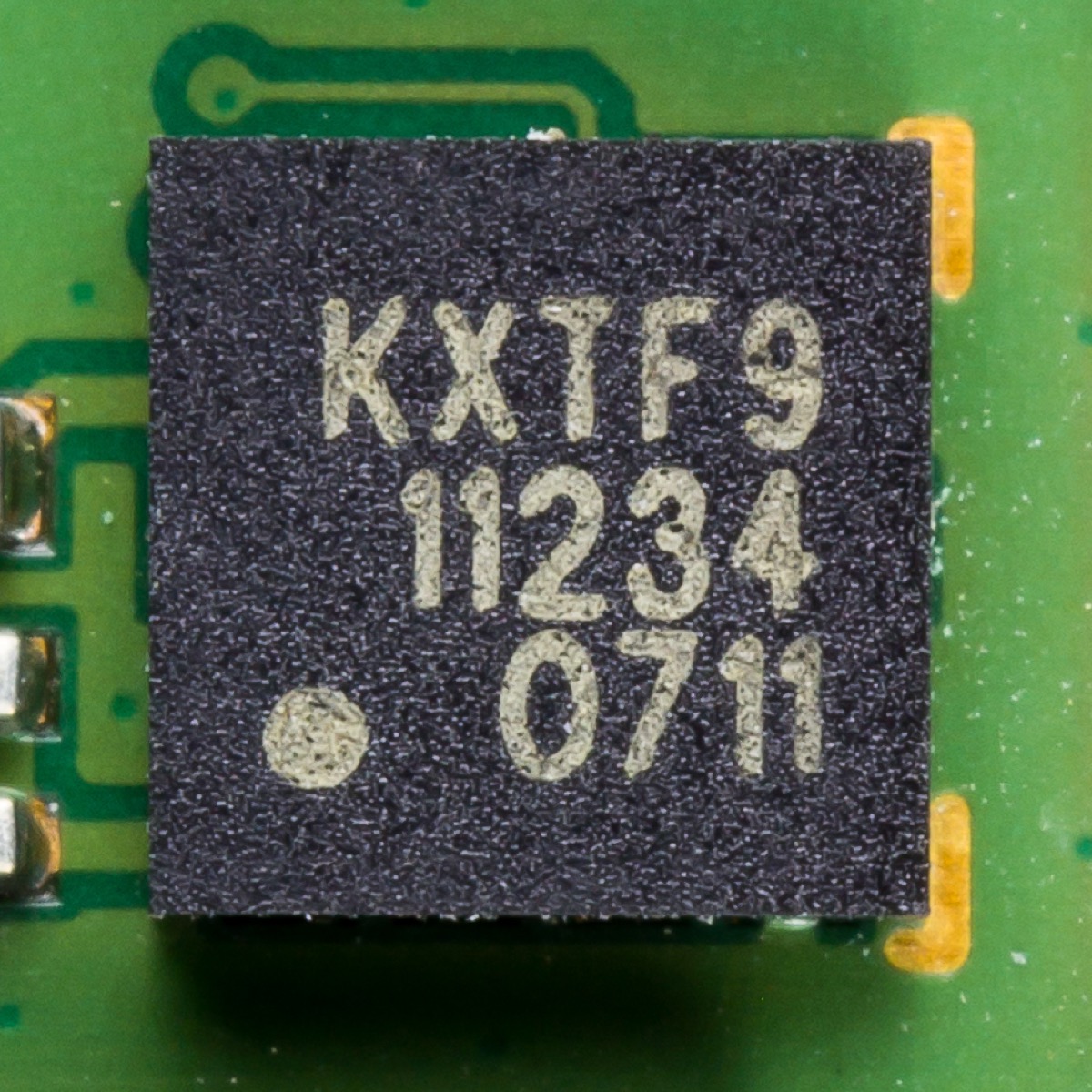
MEMS adalah singkatan dari Micro-Electro-Mechanical Systems. Menurut STMicroelectronics, salah satu produsen MEMS terbesar di dunia, elemen sensor di dalam akselerometer smartphone modern mengukur sekitar 300 mikron × 300 mikron — lebih kecil dari butir garam (STMicroelectronics, 2024). Chip ini biaya sekitar $0,50 masing-masing dalam volume produksi, namun mereka mencapai akurasi sudut yang bersaing dengan peralatan yang harganya jauh lebih tinggi.
Mekanismenya elegan. Massa mikroskopis tergantung pada pegas silikon kecil, diukir langsung ke permukaan chip menggunakan proses litografi foto yang sama dengan yang digunakan untuk membuat transistor. Ketika chip miring, gravitasi Bumi membelokkan massa yang tergantung. Lenturan itu mengubah kapasitansi antara jari-jari elektroda penyisir kecil. Chip mengukur perubahan kapasitansi itu dan mengubahnya menjadi nilai akselerasi dalam satuan g (gaya gravitasi).
Ketika Anda memegang ponsel diam, akselerometer tidak mengukur gerakan — ia mengukur komponen gravitasi yang bekerja di sepanjang setiap tiga sumbunya. Ini adalah wawasan kunci di balik setiap aplikasi tingkat roh. Gravitasi adalah gaya yang konstan dan diketahui. Jika Anda tahu berapa banyak dari itu yang bekerja di setiap sumbu, Anda dapat menghitung orientasi ponsel yang tepat.
Bagaimana Akselerometer 3-Sumbu Mengukur Kemiringan?
Akselerometer tiga sumbu menugaskan sistem koordinat ke ponsel: X berjalan kiri-kanan, Y berjalan atas-bawah, dan Z berjalan depan-belakang. Ketika ponsel berbaring datar di meja, gravitasi bekerja sepenuhnya di sepanjang sumbu Z, jadi sensor membaca sekitar 9,81 m/s² pada Z dan 0 pada X dan Y. Miringkan ponsel dan gravitasi mendistribusikan ulang — lebih sedikit pada Z, lebih banyak pada X dan Y, dalam proporsi yang tepat dengan sudut.
Trigonometri untuk mengubah ketiga bacaan ini menjadi sudut sangat mudah. Pitch (kemiringan depan-belakang) dan roll (kemiringan kiri-kanan) dihitung menggunakan fungsi tangen terbalik:
Dua rumus ini adalah seluruh inti matematis dari aplikasi tingkat roh. Masukkan tiga nilai akselerometer mentah, jalankan perhitungan, dan Anda mendapatkan pitch dan roll dalam radian. Kalikan dengan 180/π untuk mengonversi ke derajat. Itulah angka yang ditampilkan di layar.
Mengapa menggunakan akar kuadrat dari dua sumbu lainnya di penyebut daripada hanya satu? Ini menjaga rumus tetap akurat di seluruh rentang rotasi 360°. Menggunakan penyebut sumbu tunggal menghasilkan kesalahan ketika ponsel mendekati vertikal, karena satu sumbu mencapai nol dan pembagian menjadi tidak stabil. Besarnya vektor dalam penyebut menghindari ini sepenuhnya.

Spirit Level Pro menampilkan sudut pitch dan roll langsung dengan penghalusan EMA, lima preset toleransi, dan kalibrasi satu ketukan. Tidak perlu diunduh.
Coba Spirit Level Pro GratisMengapa Data Sensor Mentah Begitu Bising?
Output akselerometer MEMS mentah sangat bising. Ponsel yang benar-benar diam menghasilkan bacaan akselerometer yang berfluktuasi ±0,02-0,05 g dari saat ke saat, didorong oleh kebisingan termal dalam elektronik sensor, getaran bangunan, dan kesalahan kuantisasi dalam konverter analog-ke-digital. Tanpa filter, gelembung tingkat roh akan gemetar terus-menerus, membuatnya tidak dapat digunakan untuk pekerjaan presisi.
Tiga jenis kebisingan mempengaruhi bacaan akselerometer. Kebisingan termal adalah fluktuasi listrik acak yang disebabkan oleh panas — tidak dapat dihindari dan menetapkan lantai kebisingan akhir untuk sensor. Kebisingan getaran berasal dari lingkungan: kompresor kulkas, langkah kaki, lalu lintas. Ketidakstabilan bias adalah penyimpangan frekuensi rendah di mana titik nol sensor perlahan bergerak seiring waktu. Masing-masing memerlukan pendekatan yang berbeda untuk dikelola.
Solusi perangkat lunak standar adalah filter lulus rendah, yang melewatkan perubahan lambat (seperti kemiringan asli) sambil memblokir perubahan cepat (seperti getaran). Implementasi yang paling umum adalah exponential moving average (EMA). Setiap pembacaan baru berkontribusi fraksi alpha ke output; sisanya dibawa maju dari nilai yang disaring sebelumnya:
Spirit Level Pro menggunakan EMA dengan alpha=0,15. Kami mendarat pada nilai itu setelah menguji beberapa opsi. Nilai yang lebih rendah (alpha=0,05) menghasilkan bacaan yang sangat halus tetapi terasa lamban — gelembung tertinggal secara terlihat saat Anda memindahkan ponsel. Nilai yang lebih tinggi (alpha=0,3) lebih responsif tetapi cukup berisik untuk membuat pembacaan presisi lebih sulit ditangkap. Alpha=0,15 adalah titik di mana gelembung terasa hidup tanpa terasa gugup.
Peran Apa yang Dimainkan Giroskop?
Giroskop mengukur kecepatan sudut — seberapa cepat ponsel berputar dalam derajat per detik — bukan orientasi absolutnya. Ini adalah perbedaan utama. Giroskop saja tidak dapat memberi tahu Anda apakah ponsel itu rata; itu hanya tahu apakah itu berputar dan seberapa cepat. Untuk pengukuran tingkat statis, akselerometer saja memberikan semua yang diperlukan.
Di mana giroskop menjadi berguna adalah sensor fusion: menggabungkan data akselerometer dan giroskop untuk meningkatkan kinerja saat ponsel bergerak. Akselerometer sangat baik dalam mengukur kemiringan statis tetapi merespons secara lambat dan bising terhadap gerakan cepat. Giroskop sangat baik dalam melacak rotasi cepat tetapi bergeser seiring waktu (pembacaan mereka terakumulasi kesalahan). Filter Kalman atau filter komplementer menggabungkan kedua aliran, menggunakan giroskop untuk pelacakan dinamis cepat dan akselerometer untuk mengoreksi penyimpangan jangka panjang.
Sebagian besar aplikasi tingkat roh, termasuk Spirit Level Pro, tidak memerlukan sensor fusion karena skenario pengukuran bersifat statis — Anda menempatkan ponsel di atas permukaan dan menunggu untuk menetap. Akselerometer menangani ini dengan sempurna. Sensor fusion lebih penting untuk navigasi inersia (mengetahui ke mana drone akan pergi) daripada untuk mengukur apakah rak itu rata.
Mengapa Kalibrasi Sangat Penting?
Setiap sensor MEMS memiliki offset manufaktur — bias kecil yang dipanggang selama produksi. Sebuah penelitian 2017 di IEEE Sensors Journal menemukan bahwa akselerometer smartphone yang tidak terkalibrasi menunjukkan offset rata-rata ±1,2° di seluruh sampel perangkat populer, dengan beberapa nilai luar biasa mencapai ±2,5° (IEEE Sensors Journal, 2017). Offset itu sistematis: itu mempengaruhi setiap pembacaan tunggal dengan jumlah yang sama, dalam arah yang sama.
Kalibrasi berfungsi dengan mengukur offset ini pada permukaan referensi yang diketahui dan menyimpannya. Spirit Level Pro menyimpan nilai kalibrasi di localStorage di bawah kunci calibrationPitch dan calibrationRoll. Setiap pembacaan berikutnya mengurangi offset yang disimpan ini sebelum menampilkan hasilnya. Offset secara efektif dinolkan.
Tanpa kalibrasi, offset 1,5° berarti setiap pembacaan 1,5° salah. Aplikasi mungkin menunjukkan 0,0° sementara ponsel berada di lereng 1,5°. Dengan kalibrasi, ponsel yang sama mencapai akurasi ±0,1-0,3° — peningkatan 5-10 kali tanpa biaya.
Bagaimana Suhu Mempengaruhi Akurasi?
Sensor MEMS sensitif terhadap suhu. Pegas silikon yang menggantung massa bukti memperluas dan menyusut saat suhu berubah, menggeser pembacaan titik nol. Sebagian besar akselerometer kelas konsumen bergerak 0,1-0,5° untuk setiap perubahan suhu 10°C (Lembaran data Analog Devices ADXL345, 2023). Membawa ponsel dari mobil yang hangat (25°C) ke garasi yang dingin (5°C) memperkenalkan potensi penyimpangan 1,0° sebelum sensor stabil.
Konsekuensi praktis: kalibrasi pada suhu tempat Anda akan bekerja. Kalibrasi yang dilakukan di kantor yang hangat tidak akan sepenuhnya mengkompensasi perilaku sensor di garasi yang dingin. Ini bukan berarti terobsesi dengan suhu untuk setiap tugas. Untuk menggantung gambar atau memeriksa rak, penyimpangan dapat diabaikan. Untuk pekerjaan presisi dalam ±0,2°, biarkan ponsel stabil selama dua menit setelah perubahan suhu yang signifikan sebelum kalibrasi.

iPhone vs Android: Apakah Hardware Sensor Berbeda?
Ya, dan perbedaannya penting. Apple merancang tumpukan sensor gerakan mereka sendiri. iPhones dari iPhone 6s dan seterusnya mencakup koprosesor gerakan desain Apple (M9 dan yang lebih baru), yang menangani data sensor secara independen dari CPU utama. Samsung Galaxy flagship menggunakan sensor dari STMicroelectronics (seri LSM6DSO), yang menggabungkan akselerometer 3-sumbu dan giroskop 3-sumbu pada satu dies. Ponsel Google Pixel telah menggunakan sensor dari Bosch (BMI270) dan TDK InvenSense, tergantung generasinya.
Dalam praktik, flagship iPhones dan flagship Androids berkinerja hampir identik setelah kalibrasi, keduanya mencapai ±0,1-0,15°. Pembagian nyata adalah antara flagship dan budget Android. Ponsel budget menggunakan MEMS spesifikasi lebih rendah — biasanya resolusi 10-12 bit versus 14-16 bit pada flagship — dan menunjukkan 2-3 kali lebih banyak kebisingan dalam output sensor mentah. Setelah kalibrasi, bahkan ponsel budget biasanya mencapai ±0,3-0,4°, yang memadai untuk sebagian besar pekerjaan DIY.
Komponen yang paling membedakan kinerja tingkat roh iPhone bukan akselerometer itu sendiri — itu Koprosesor Gerakan Apple yang berjalan bersama CPU utama. Secara terus-menerus mengumpulkan data sensor pada tingkat sampel tinggi bahkan ketika aplikasi tidak berada di latar depan. Ini memberikan filter EMA lebih banyak titik data per detik untuk digunakan. Inilah sebabnya iPhones terasa sangat halus dalam aplikasi tingkat roh, bahkan ketika spesifikasi sensor mentah terlihat sebanding dengan alternatif Android.
Pertanyaan yang Sering Diajukan
Bagaimana cara kerja aplikasi tingkat roh di ponsel?
Aplikasi tingkat roh menggunakan akselerometer MEMS bawaan ponsel untuk mengukur arah akselerasi gravitasi di tiga sumbu (X, Y, Z). Saat ponsel miring, gravitasi terdistribusi kembali di antara sumbu. Aplikasi menghitung sudut pitch dan roll menggunakan rumus arctan, menerapkan penghalusan untuk mengurangi kebisingan sensor, dan menampilkan hasilnya sebagai vial gelembung atau pembacaan sudut numerik. Seluruh perhitungan berjalan ratusan kali per detik.
Seberapa akurat akselerometer ponsel untuk penggunaan tingkat roh?
Ponsel flagship mencapai akurasi ±0,1-0,3° setelah kalibrasi. Ponsel Android budget dapat menunjukkan ±0,5-1,5° tidak terkalibrasi karena sensor MEMS resolusi lebih rendah dan varians manufaktur lebih tinggi. Penelitian IEEE Sensors Journal 2017 menemukan bahwa kalibrasi saja mengurangi kesalahan rata-rata lebih dari 70% di semua tingkat perangkat. Untuk sebagian besar pekerjaan DIY dan perdagangan, ponsel kelas menengah yang terkalibrasi memiliki akurasi yang cukup (IEEE Sensors Journal, 2017).
Apakah aplikasi tingkat roh menggunakan giroskop?
Untuk pengukuran level statis, tidak. Akselerometer saja memberikan sudut kemiringan. Giroskop mengukur kecepatan rotasi daripada posisi, jadi itu tidak dapat memberitahu Anda apakah ponsel itu rata — hanya berapa cepat itu berputar. Beberapa aplikasi menggunakan sensor fusion (menggabungkan kedua sensor) untuk bacaan yang lebih halus selama gerakan, tetapi untuk menekan ponsel terhadap dinding atau permukaan dan membaca sudut, akselerometer menangani semuanya.
Mengapa aplikasi tingkat roh saya membaca sedikit salah bahkan di permukaan datar?
Penyebab paling umum adalah offset manufaktur — setiap chip MEMS memiliki bias kecil yang ditetapkan di pabrik yang menyebabkannya membaca nol bahkan ketika sempurna datar. Mengkalibrasi aplikasi pada permukaan datar yang diketahui mengatasi ini. Penyebab lain termasuk penyimpangan suhu (0,1-0,5° per perubahan 10°C), casing ponsel yang sedikit membuat perangkat miring di permukaan, atau kotoran dan puing permukaan. Kalibrasi pada meja kaca bersih setelah perubahan suhu apa pun mengatasi sebagian besar masalah.
Gambaran Lengkap
Aplikasi tingkat roh bekerja karena fisika dapat diandalkan. Gravitasi konstan, akselerometer mengukurnya secara terus-menerus, dan trigonometri mengubah tiga angka menjadi sudut. Rantai dari elemen sensor MEMS ke tampilan gelembung sepenuhnya deterministik — tanpa dugaan, tidak ada kotak hitam.
Apa yang membedakan aplikasi tingkat roh yang baik dari yang biasa-biasa saja bukanlah akses ke hardware yang lebih baik. Setiap ponsel flagship dikirimkan dengan sensor yang lebih dari mampu. Perbedaannya ada dalam perangkat lunak: seberapa baik aliran sensor mentah disaring, bagaimana kalibrasi diimplementasikan dan disimpan, bagaimana preset toleransi memetakan ke tugas dunia nyata. Lakukan dengan benar dan chip MEMS $0,50 memberikan akurasi yang bersaing dengan baik dengan instrumen khusus yang biayanya lima puluh kali lebih banyak.
Memahami cara kerja sensor juga membuat Anda pengguna yang lebih baik. Kalibrasi pada suhu kerja. Lepaskan kasing untuk bacaan presisi. Biarkan pembacaan menetap selama satu detik sebelum mempercayainya. Kebiasaan ini mengikuti langsung dari mengetahui apa yang sebenarnya dilakukan hardware.